
Editor’s note: This post is part of a series showcasing BSE master projects. The project is a required component of all Master’s programs at the Barcelona School of Economics.
Around the world, and especially in high-tech economies, the demand and adoption of industrial robots have increased dramatically. The abandonment of robots (referred to as derobotization or, more broadly, deautomation) has, on the other hand, been less discussed. It would seem that the discussion on industrial robots has rarely been about their abandonment because, presumably, the abandonment of industrial robots would be rare. Our investigation, however, shows that the opposite is true: not only do a substantial number of manufacturing firms deautomate, a fact which has been overlooked by the literature, but the reasons for which they deautomate are highly multi-dimensional, suggesting that they depend critically on the productivity of firms and those firms’ beliefs about robotization.
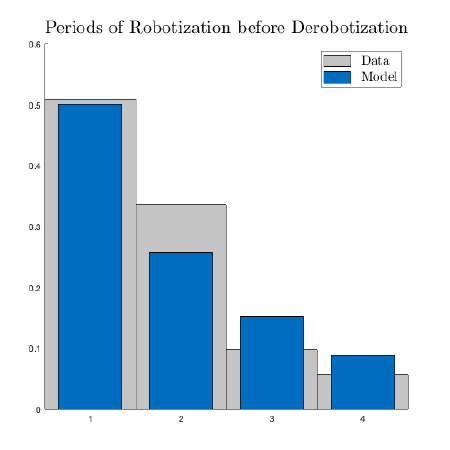
Extending the analysis of Koch et al. (2019), we use data from SEPI Foundation’s Encuesta sobre Estrategias Empresariales (ESEE), which annually surveys over 2000 Spanish manufacturing firms on business strategies, including on whether they adopt robots in their production lines. We document three major facts on derobotization. First, firms that derobotize tend to do so quickly, with over half derobotizing in the first four years after adoption of robots. Second, derobotizing firms tend to be relatively smaller than firms which stay automated for longer periods of time. Third, firms that abandon robots demand less labor and increase their capital-to-labor ratios. The prompt abandonment of robots, we believe, is indicative of a learning process in which firms robotize production with expectations of higher earnings, but later learn information which causes them to derobotize and adjust their production accordingly.
With this in mind, we propose a dynamic model of automation that allows firms to both adopt robots and later derobotize their production. In our setup, firms face a sequence of optimal stopping problems where they consider whether to robotize, then whether to derobotize, then whether to robotize again, and so on. The production technology in our model is micro-founded by the task-based approach from Acemoglu and Autor (2011). In this approach, firms assign tasks to workers of different occupations as well as to robots in order to produce output. For simplicity, we assume two occupations, that of low-skilled and high-skilled workers, where the latter workers are naturally more productive than the former. When firms adopt robots, the firm’s overall productivity (and the relative productivity of high-skilled workers) increases, but the relative productivity of low-skilled workers decreases. At the same time, once firms robotize they learn the total cost of maintaining robots in production, which may exceed their initial expectations. At any point in time, firms can derobotize production with the newfound knowledge of the cost. Likewise, firms can reautomate at a lower cost with the added assumption that firms retain the infrastructure of operating robots in production.
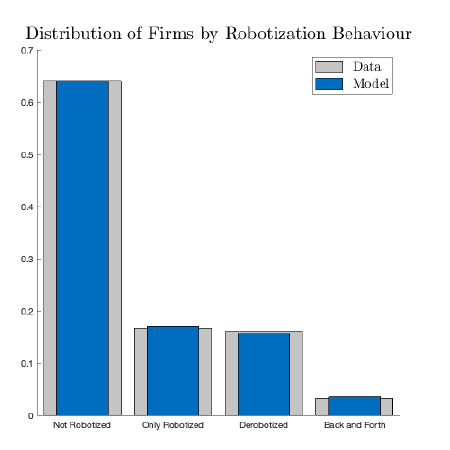
The simulations of our model can accurately explain and reproduce the behavioral distribution of automation across firms in the data (see Figure 1). Indeed, we are able to show that larger and more productive firms are more likely to robotize and, in turn, the firms which derobotize tend to be less productive (referred to as the productivity effect). However, the learning process which reveals the true cost of robotized production (referred to as the revelation effect) also highlights the role of incomplete information as a plausible explanation for prompt abandonment. Most importantly, our simulations suggest that analyses which ignore abandonment can overestimate the effects of automation and, therefore, must be incomplete.
Our project is the first, to our knowledge, to document the pertinent facts on deautomation as well as the productivity effect and the revelation effect. It is apparent to us, based on our investigation, that any research seeking to model automation would benefit from modeling deautomation. From that starting point, there remains plenty of fertile ground for new questions and, consequently, new insights.